We use principles of robotics to solve challenging problems using automation. In recent years, our focus has been on a variety of drone-based swarm coverage tasks. In the past, many of our approaches sought ways to overcome underactuation (when there are more items to control that there are control inputs). An example of this is positioning a set of balls that can roll in a tray where tilting the tray moves all balls at once.
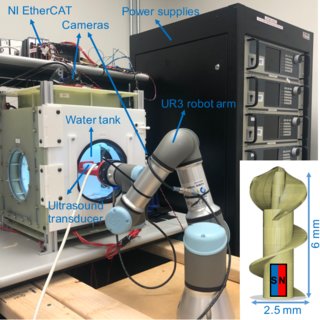
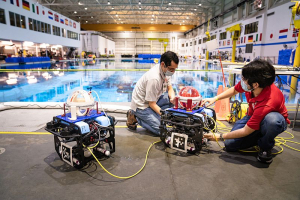
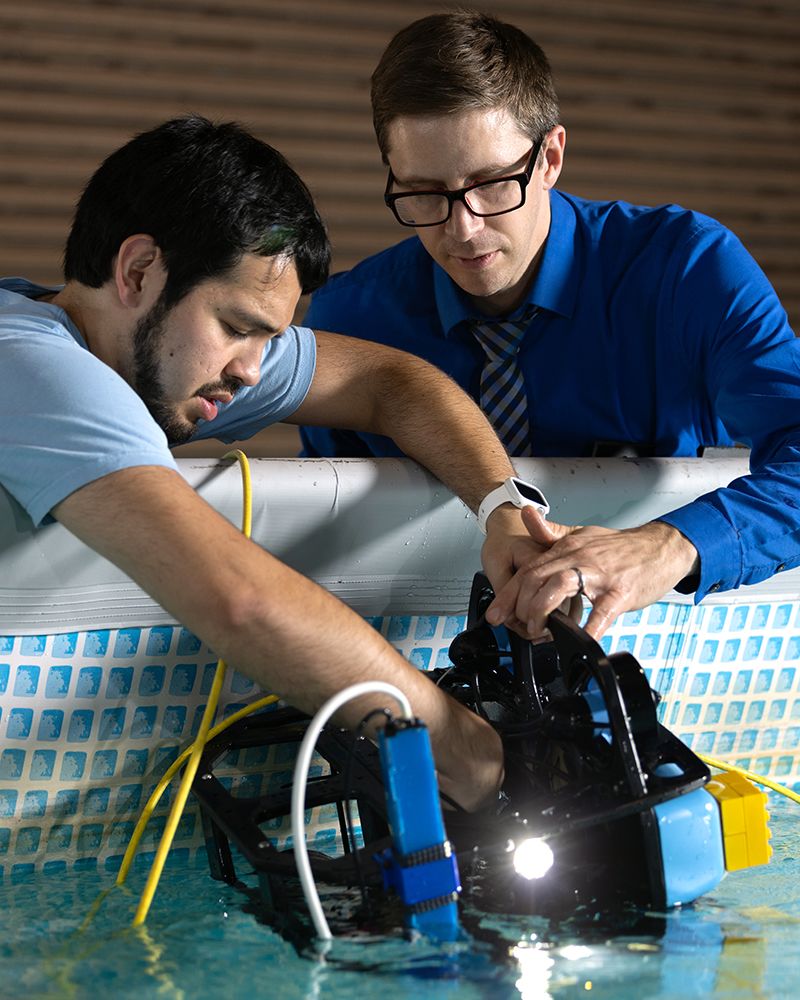
In our lab, you’ll find the world’s first magnetic manipulator cooled by liquid nitrogen, magnetic micro-bot swimmers for Thrombi Treatment, a plethora of drone swarm applications, teams of tracked robots that build structures, underwater robotics, MRI-powered robots, and hundreds of miniature robots trying to move toward light.
The Robotic Swarm Control lab is under the direction of Dr. Aaron Becker!